 400-718-2588
400-718-2588  商城
商城 











































三维CAD——轻松设计履带机器人
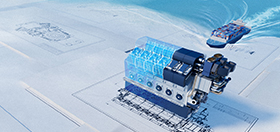
返回 我是一名河南科技大学的学生,专业是热力发动机设计。因为我对履带车非常感兴趣,所以一直希望能设计一种属于自己的履带车,在半年前开始酝酿图纸和构想。但是由于国外的三维CAD设计软件太复杂,学起来有点吃力,一直也没有很好的效果。后来老师推荐我用中望3D这款三维CAD软件,于是我开始学习使用中望3D进行设计参赛。中望3D确实很快上手,刚好中望3D在腾讯课堂推出三维CAD免费线上培训,互动学习效率特别高,进步特别快。我边学边用,借助中望3D的强大功能,很快,一种基于太阳能驱动的履带机器人就应运而生。整体如下图所示:
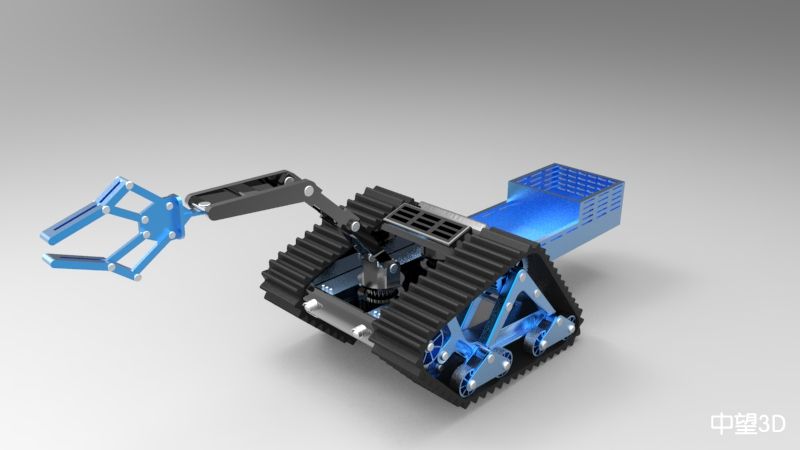
该履带机器人的想法主要是针对目前国内履带机器人领域,为了高效地利用能源和更加灵巧地执行任务。该履带机器人携带一个多自由度机械臂可进行威胁爆炸物排除,野外侦察探测,甚至可进行排雷等危险工作。同时该履带车采用推杆电机驱动前轮的特点可实现履带倾斜角的变化适应不同路况的行进,改变履带角度最大可爬坡角度为75度,路面行驶能力较强,如图所示的推杆电机带动前轮实现履带倾斜角度变化:
接下来谈一下我使用中望3D设计履带机器人中的一些关键要点:
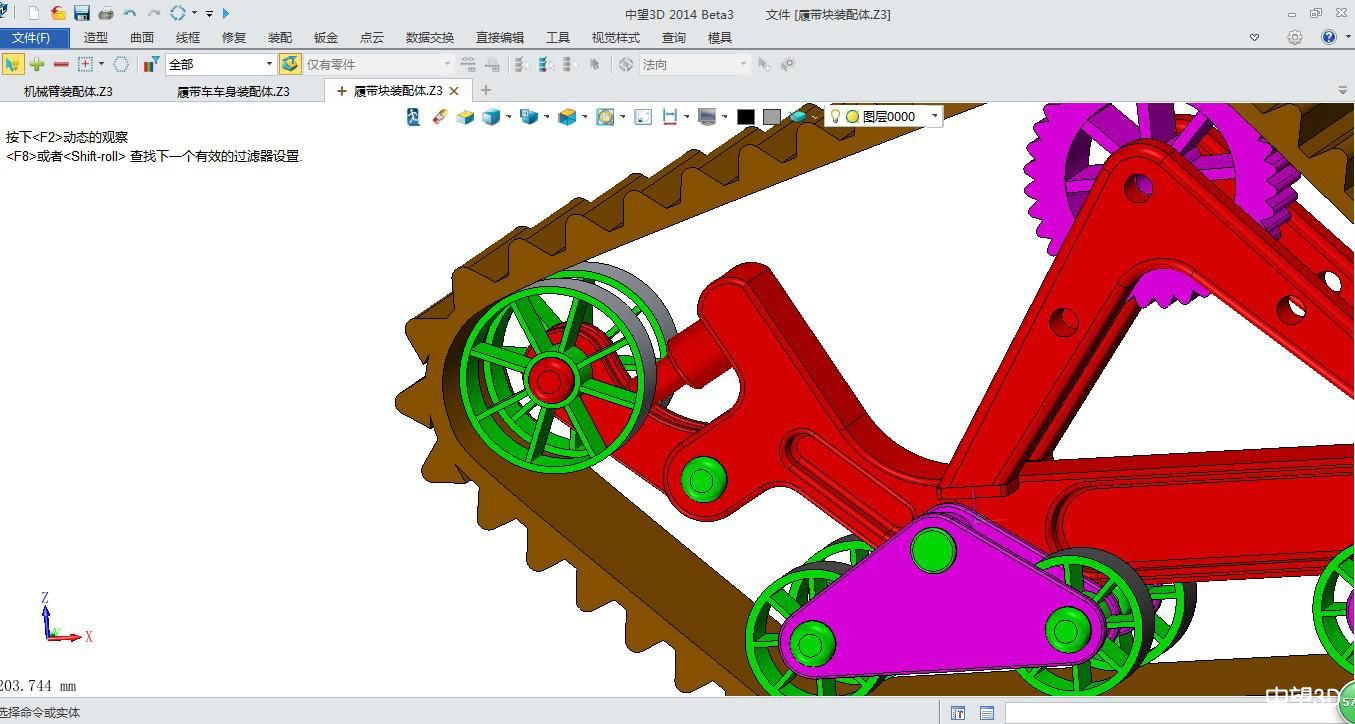
当时在设计机械臂部分时,刚开始不太熟练,以为中望3D装配体肯定很复杂,结果我发现它并没有类似于catia那样的繁琐,较之solidworks也是非常快捷的,这更加坚定我使用中望3D设计了,所以我以该履带机器人中机械臂为例大致说一下建模过程,该机械臂如图所示:
该机械臂是由机械臂底盘,手掌,手臂指长杆,短杆等若干个零件组装而成的,在手臂指建模过程中:
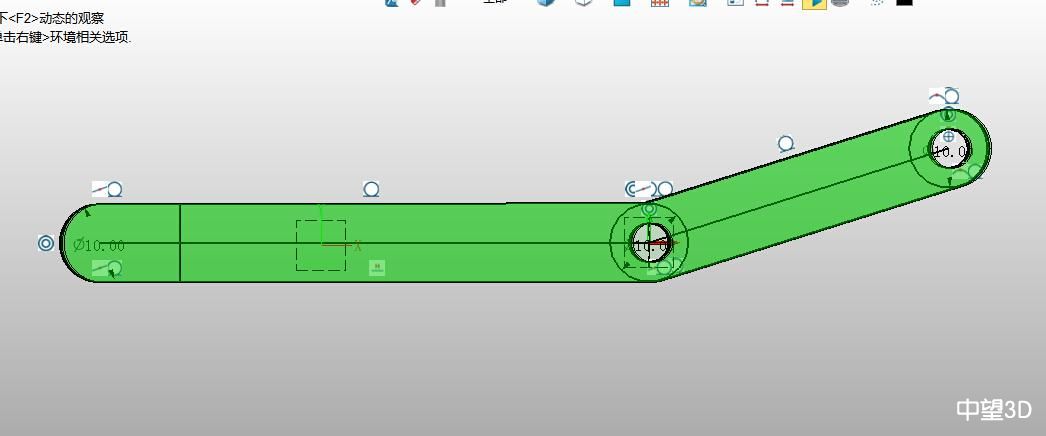
第一,先在XY平面内画出草图,其中两条直线的夹角为150度,如图所示:
第二步,退出草图,拉伸基体,厚度为10mm。
第三步,在基体上建立草图,退出草图拉伸凸台。
第四步,以凸台中的一平面为镜像平面,镜像出另一半。
第五步,在手臂指关节处拉伸出孔特征。
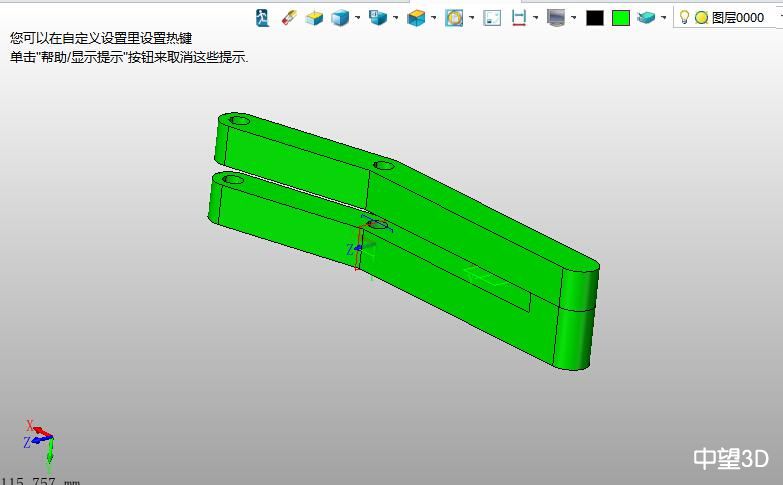
第六步,手臂指建模轻松完成。如下图所示:
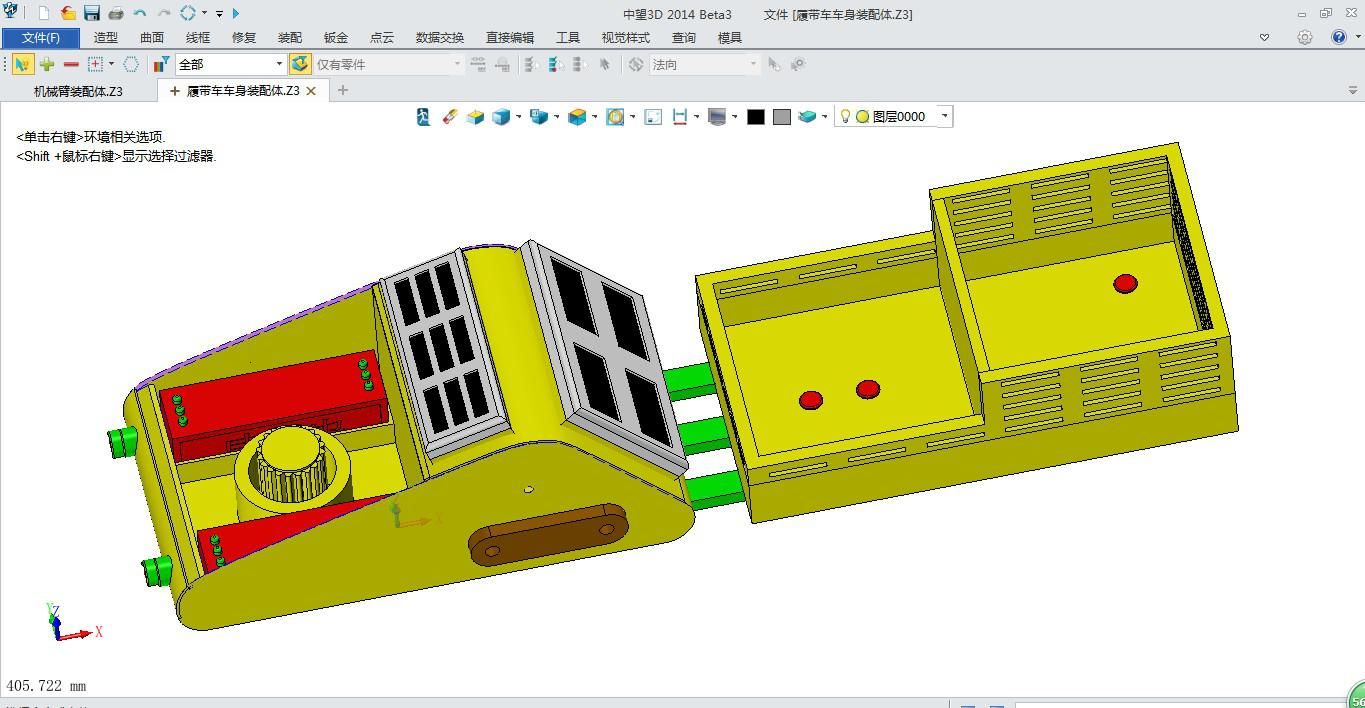
除此之外,由于未来绿色能源是主旋律,所以该履带机器人充分利用了太阳能,将两块太阳能电池板分别布放在履带车的顶部与背部,同时考虑到天气因素,在履带车前部安放两块氢镍电池进行互补,履带车后部为储物箱,具体如下图所示:
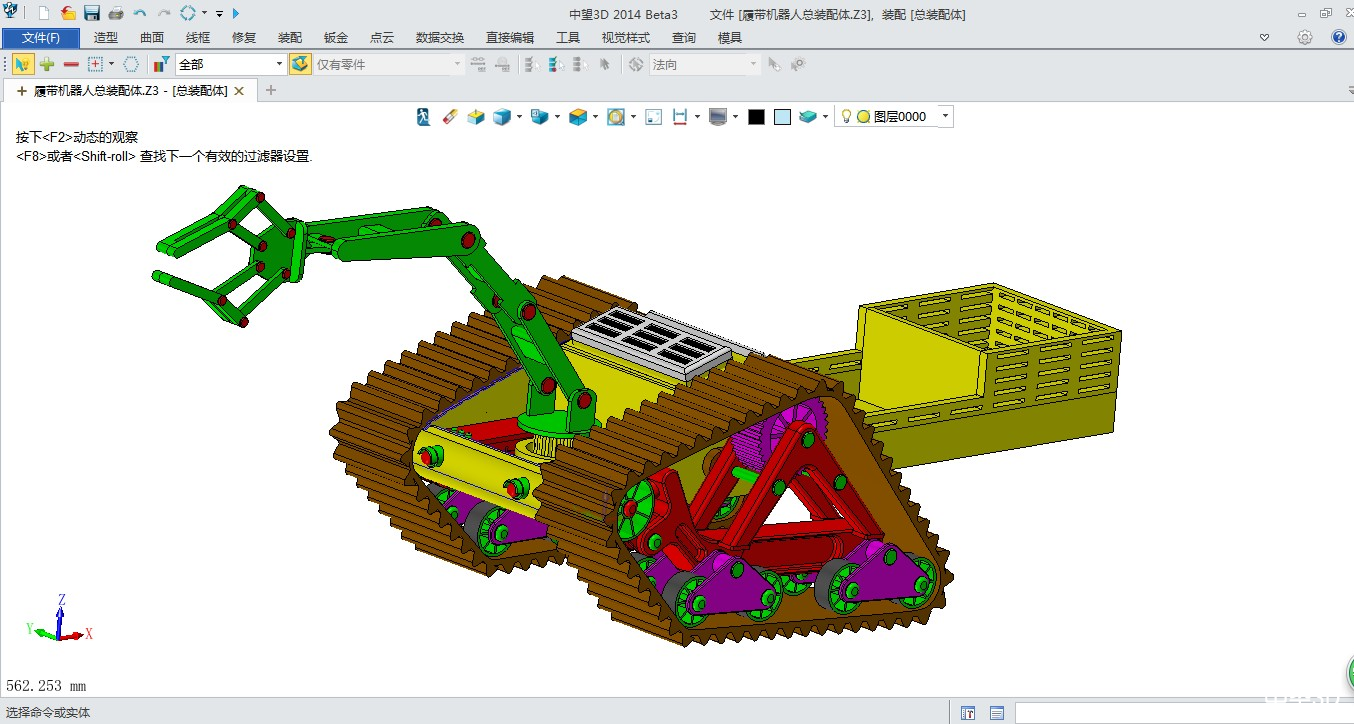
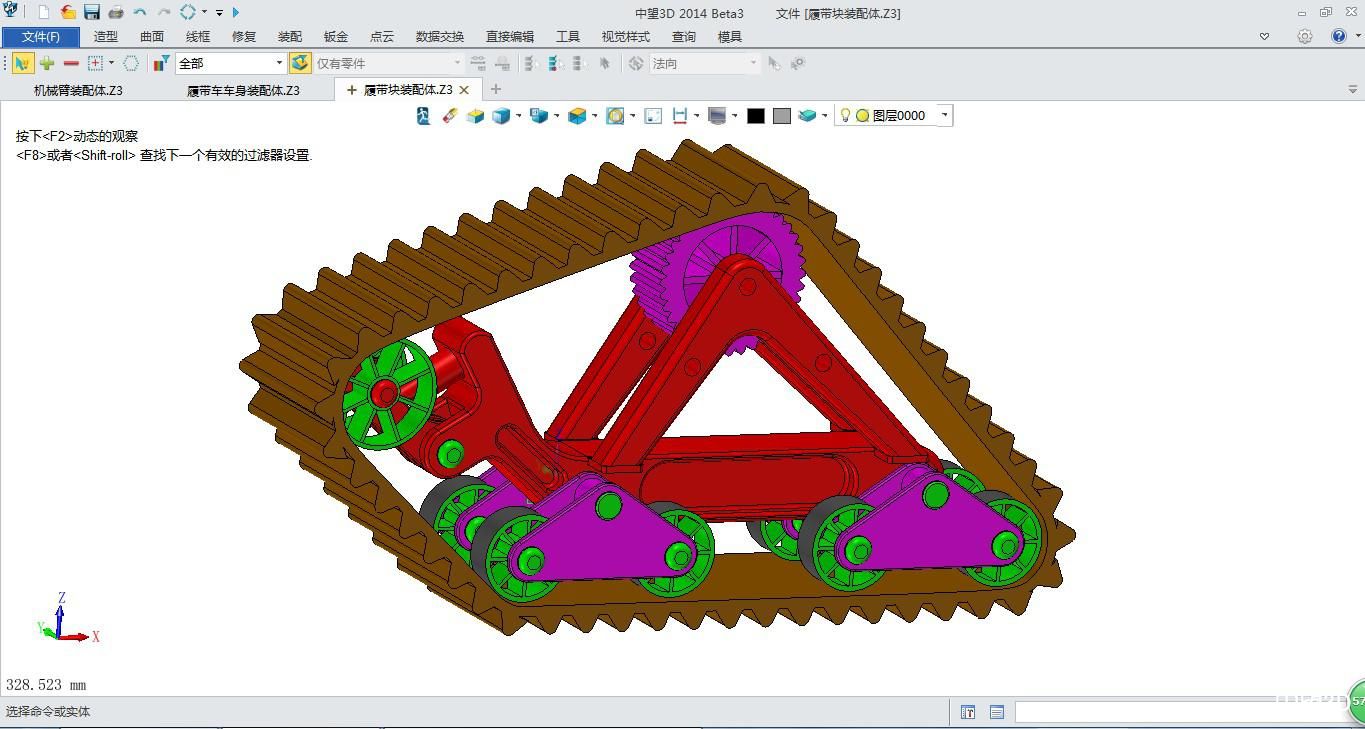
当然了在考虑该履带车的路况适应能力时,我对履带部分进行了创新性设计,内外侧共8个负重轮,行进能力更加出众,履带采用变角度设计,针对路障及较极端路况也有很好的适应能力,设计如下图所示:
使用中望3D软件,我最终轻松地完成了一种基于太阳能驱动的履带机器人的三维建模,也在2014中国3D工业设计创新大赛中荣获学生组优胜奖。感谢中望3D软件这个默契的建模伙伴,它出色的装配设计功能太出人意料了!中望3D的界面与很多国外三维CAD软件有共通之处,容易上手。但中望3D又有自己的特色,例如边学边用编辑器,这绝对是国内甚至国际首创的,这对于新手来说尤为重要!其他的优点也就不一一道来,谁用谁知道!希望未来有更多的人会选择中望3D这款好用强大的三维CAD软件。我相信,未来在国内公司使用的三维CAD软件不仅仅是solidworks,proe,catia,ug,nx还会有更多的是中望3D,愿国产三维CAD软件能够走得更远些,这也是中国梦的一部分!
设计者:樊亚辉